This is the result of session 4 in my course on Social Robot Design (2025/2026). The content of this session was mainly about the different types of embodiment that robots can have, what embodiments are used in social robot research, and how we can design a tool and think about how to design embodiments.
This was done with:
- Liz van Ginderen (s27349745)
- Anna Hornman (s3056600)
- Oyindrila Sen Gupta (s3697762)
- Sarah Mans (s2306379)
Social Robotics: Embodiment, Design, and Prototyping Tools
1. State of the Art in Social Robot Research
You might have been considering a number of application areas for social robotics since the start of this course. We have shown examples in education, healthcare, the hospitality sector, etc. Very often research (or simple experiments in the wild) are carried out by hardware that happens to be available, rather than hardware that is specifically designed for a purpose (hence you see research with Pepper the librarian, Pepper the trainer and Pepper the educator).
Is NAO/Pepper Still Dominant?
Research has been done with different types of robots, Nao and Pepper being very popular, but in certain sectors, such as elderly care, less focus on those types of robots is placed, but robots like the seal are more prominent.
Studies using NAO or Pepper:1 2 3 4
Studies using Pepper, Spritebot, and Anki Cozmo:5
Studies not using NAO or Pepper:6 7
Miroka robot:8
2. Freedom of Embodiment
What would happen when you have total freedom over the embodiment you choose? When you have total freedom in your robot it opens up a lot of new possibilities such as more specialized robots. Maybe a robot dog with fluffy ears but powerful motors, or something more grounded in fantasy like a fairy-like robot. It opens up new possibilities in the embodiment of the robot and therefore the scenario you can act out.
The aspects that would make it (un)suitable are related to size, form and friendliness. You wouldn’t use a big human-sized robot as a tabletop teaching assistant for example.
3. Morphological Matrix of Available Robots
| Animal-ish shaped | Human shaped | Human size | Non-human/non-animal shaped | Smaller size | White plastic | Other colour/material | |
|---|---|---|---|---|---|---|---|
| Animal-ish shaped | — | — | Jurassic Park / theme park robots | — | iCat, seal, MiRo, Spritebot, Mini, Maggie | MiRo | iCat (black & white fluffy), seal (white fluffy), Spritebot (colourful feathers) |
| Human shaped | Miroka | — | Any humanoid (1X, Tesla, Unitree) | — | NAO | Pepper, NAO | Miroka (orange plastic) |
| Human size | — | — | — | — | — | Pepper | Miroka |
| Non-human/non-animal shaped | — | — | — | IDo | Anki Cozmo | IDo | iCat |
| Smaller size | iCat, seal, MiRo, Spritebot, Mini, Maggie | NAO | — | Anki Cozmo | — | NAO, MiRo | iCat |
4. Design Tools for Novel Robot Embodiment Prototyping
Some state of the art approaches in design tools to shape expressiveness for robotics are highlighted below. This includes movement analysis, biomimetic approaches as well as 3D animation tools. Another approach is called Makey Makey prototyping where users create tangible user interfaces using everyday objects.
State of the Art
OPSORO9
An open platform for the design of social robot embodiments for face-to-face communication. The platform consists of a set of modules that each implement a different facial feature. It also has the electronics to drive the module and sensor, a software environment to program the features and a methodology.
Shaping Expressiveness in Robotics10
It introduces a design method to support engineers to build expressive robotic arms. Consists of interactive workshops that included dancing so that designers understood the full range of motion. It helps to bridge the gap between human intent and robot expressiveness.
Makey Makey Prototype11
Makey Makey is a commercially available invention kit that functions as a human-computer interface device, enabling conductive everyday objects (such as fruit, water, graphite, or conductive dough) to serve as input controls. It does this by detecting when a tiny electrical circuit closes. When a user touches a conductive object while maintaining contact with the ground wire, the circuit closes and the board transmits a standard keyboard or mouse event to the connected computer via USB.
As a design research tool, Makey Makey supports rapid physical prototyping of novel interfaces prior to electronic fabrication. Designers can sketch interaction layouts on paper using conductive media (e.g., graphite pencil) and test them in software environments immediately. Its low technical barrier facilitates participatory design methods, allowing non-specialist stakeholders to engage in the prototyping process without programming knowledge.
Our Own Design Tools
Dreamworld
Dreamworld is a game where you can personalize a character in freeform using generative AI. Like drawing a skeleton, and prompt AI to complete the picture. You can change the colors or shape very easily and intuitively, allowing for rapid prototyping. The characters are also interactive which helps the design process. This is good for iterative design.
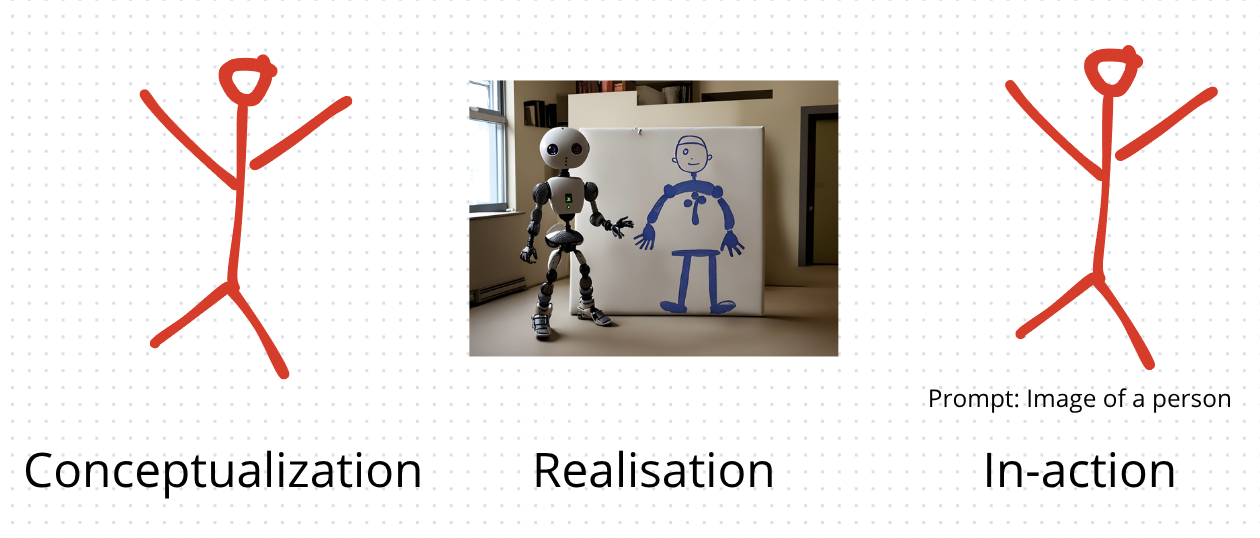 Figure: Illustrative example of skeleton-based embodiment generation (reference images, not our own generated output — our Dreamworld session for MiRo-e was planned but not executed).
Figure: Illustrative example of skeleton-based embodiment generation (reference images, not our own generated output — our Dreamworld session for MiRo-e was planned but not executed).
- Conceptualisation — A stick-figure skeleton represents the starting structure a generative tool builds from
- Realisation — A reference image of a robot posed next to a simplified figure drawing, illustrating how a fixed skeleton constrains generation to a consistent body.
- In-action — Prompt: “Image of a person.” Illustrates the moment of use, where a text prompt is fed into the tool to generate a variant from the skeleton.
HRI knowledge embedded in Dreamworld
Dreamworld generates from a fixed skeleton rather than a blank prompt, so every variant keeps MiRo-e’s real proportions and kinematics (range of motion). This is a formal constraint built into the tool itself and stops the group from designing a look that promises capabilities the robot doesn’t have. Only surface-level choices, colour, material, texture, are left open, which is what actually shapes how approachable or relaxing the robot feels.
Card Game
A card game where every card asks a question about how your robot would show emotions/interact with something/react to something/etc. An example would be: ‘How does your social robot show joy?’ Or ‘How does your robots’ look connect to their task?’
Application to Our Case
Our case is MiRo-e as a study buddy that checks in on you while you work. We used Dreamworld to explore embodiment options for this case: starting from a rough skeleton and prompting generative AI to iterate on it’s shape, material, and colour.
Inputs. We started from a short case description: MiRo-e checks in on a student during a study session, notices signs of stress or distraction, and offers encouragement. As a starting point we sketched a simple skeleton close to MiRo-e’s existing animal-like proportions (rounded body, moving ears, no arms/hands, low to the ground) rather than starting from scratch, since our case builds on an existing platform. From this you can use a image to image model to “inpaint” the robot.
Options generated (illustrative).
- A “soft, plush” variant. Rounded shape with a fabric-like texture. We prompted it to feel calming and not judgmental for a stressed student.
- A “bright, playful” variant. Glossy plastic finish, saturated colours, big expressive ears. We prompted it to feel energetic and encouraging.
- A “minimal, quiet” variant. Matte grey and neutral tones, small ear movement range. We prompted it to feel a bit in the background.
Observations. Iterating quickly between these three let us compare embodiments side by side instead of debating them in words. The “soft, plush” and “minimal, quiet” variants both felt right, just for different moments. Plush felt more comforting during a stress check-in, while minimal felt better suited to sitting quietly in the background while someone is studying. It is dependent on the context.
Embodiment direction reached. We landed on something close to the “soft, plush” variant as MiRo-e’s main look, but with the muted, low-key colouring from the “minimal, quiet” variant. So that it would be comforting enough to invite someone to open up during a check-in, but not so visually loud that it distracts during regular study time.
What changed in our case description. Originally the case just said MiRo-e “checks in on the student,” with nothing about how it should look. After this session we decided to add actual material and a colour direction: soft, matte, muted tones instead of glossy or brightly saturated ones. The generated options showed that finish and colour saturation really do change whether the robot reads as calming or active.
Evaluation and Reflection
Dreamworld’s biggest strength for our case was how fast we could compare options. Instead of arguing over what “cute” or “playful” or “minimal” even means, we could just generate all three and react to them side by side. We could test several directions in about the time it would’ve taken to sketch just one by hand. And it was more freeform too.
The main weakness is that the tool is built for visual appeal and novelty, not for grounding decisions in HRI theory. Nothing in Dreamworld itself asks you whether a look actually matches the robot’s real capabilities, or how a colour or material choice affects how approachable or realistic it seems.
If we changed the tool, we would add a short prompt or more guidelines after each generated variant. That way the capability matches the expectations better and becomes part of the tool itself instead of something we have to remember to bring up separately.
This connects to Duffy’s (2003) work on anthropomorphism in social robots. He argues that a robot’s appearance sets up expectations about what it can do, and that a mismatch undermines the trust once the mismatch is noticed 12.
References
Abdi et al. (2021) — NAO/Pepper in assistive robotics. https://pmc.ncbi.nlm.nih.gov/articles/PMC7860159/ ↩︎
Belpaeme et al. (2018) — Social robots in education. https://www.science.org/doi/full/10.1126/scirobotics.aat5954 ↩︎
Serholt et al. (2020) — Robot tutors and interaction quality. https://www.tandfonline.com/doi/full/10.1080/10447318.2020.1801172 ↩︎
ACM HRI — Pepper-based interaction study. https://dl.acm.org/doi/10.1007/978-981-95-2398-6_18 ↩︎
Broadbent et al. (2019) — Pepper, Spritebot and Anki Cozmo comparison. https://arxiv.org/abs/1912.00312 ↩︎
Heerink et al. (2013) — Social robots for elderly care. https://link.springer.com/article/10.1007/s12369-013-0178-y ↩︎
Broekens, Heerink & Rosendal (2009) — Assistive social robots in elderly care. https://d1wqtxts1xzle7.cloudfront.net/4729554/broekens_heerink_rosendal_2009-libre.pdf ↩︎
ACM (2025) — Miroka robot. https://dl.acm.org/doi/10.1007/978-981-95-2398-6_4 ↩︎
Vanderborght et al. (2016) — OPSORO: An open platform for the design of social robot embodiments for face-to-face communication. https://ieeexplore.ieee.org/abstract/document/7451764 ↩︎
Wallkötter et al. (2025) — Shaping Expressiveness in Robotics: The Role of Design Tools in Crafting Embodied Robot Movements. https://arxiv.org/pdf/2602.04137 ↩︎
Jacoby & Silver (2012) — Makey Makey: Improvising Tangible and Nature-Based User Interfaces. https://dl.acm.org/doi/10.1145/2148131.2148219 ↩︎
Duffy, B.R. (2003). Anthropomorphism and the social robot. Robotics and Autonomous Systems, 42(3–4), 177–190. https://doi.org/10.1016/S0921-8890(02)00374-3 ↩︎